Flowers AI & CogSci Lab
Artificial intelligence, Cognitive Sciences, Education and Scientific Discovery
Meka
We have a humanoïd torso on wheels made by Meka Robotics. This robot is designed to be compliant and force controlled and has an expressive head designed for human-robot interaction. It is used for different research topics such as motion control, object learning and human-robot interaction.

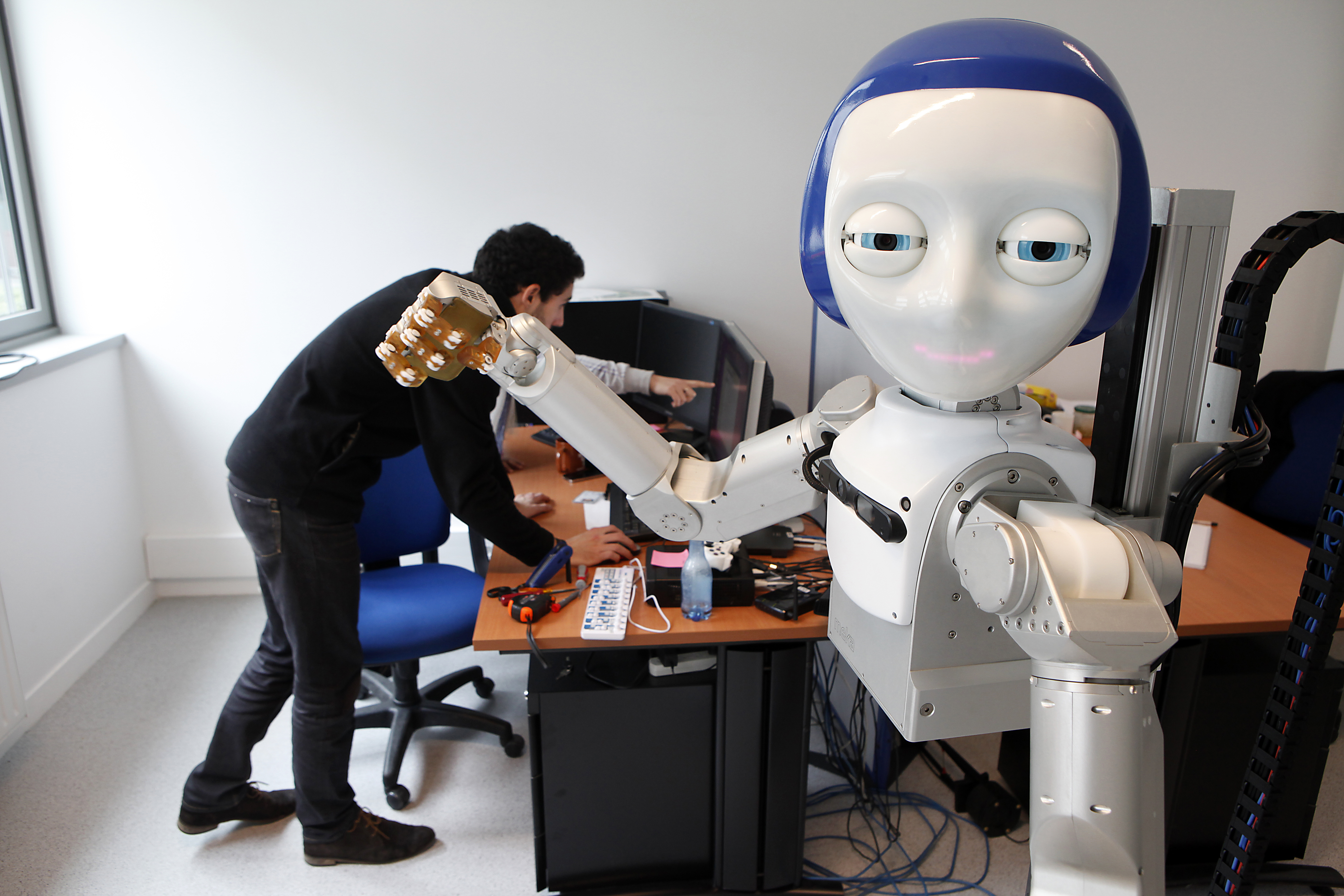
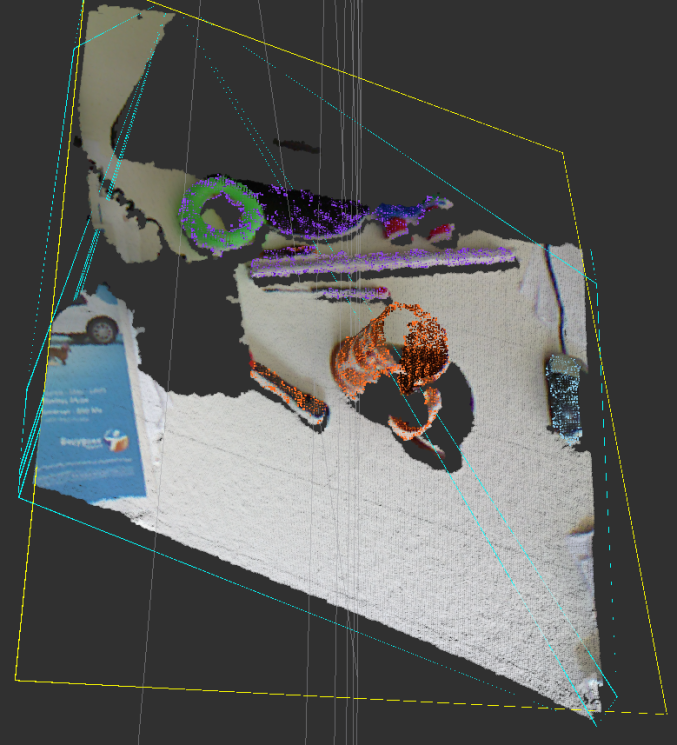
It is equiped with two cameras in the eyes, and a depth-camera in the torso which make it possible to detect humans and objects in front of it. The software architecture is interfaced with ROS.
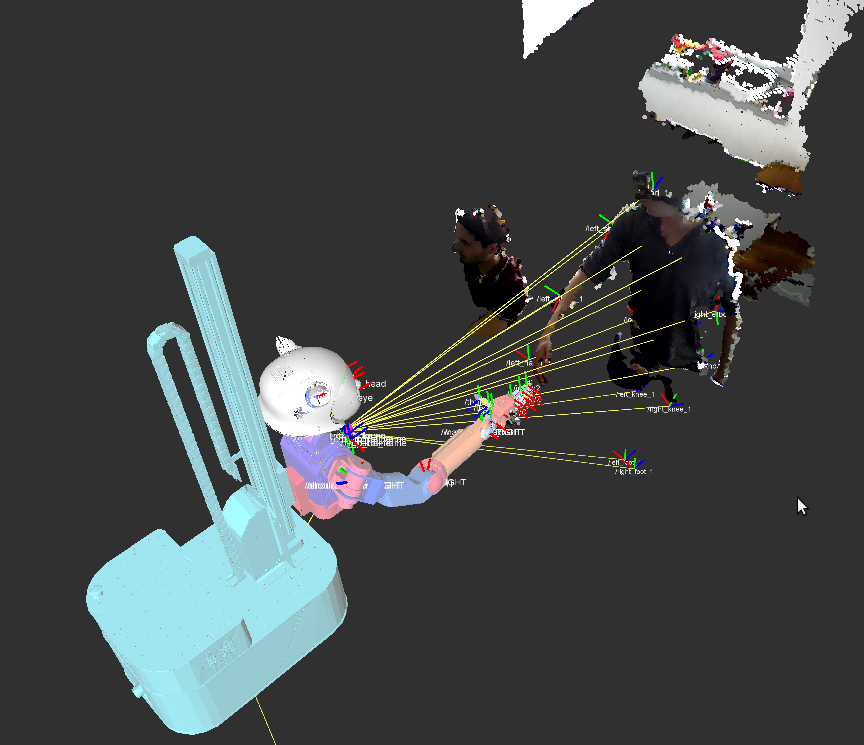
Below is an example of skill learning based on Dynamic Mouvement Primitives:
Inria Center of the University of Bordeaux

Inria Bordeaux Sud-Ouest
200, avenue de la vieille tour
33405, Talence
France
