Flowers AI & CogSci Lab
Artificial intelligence, Cognitive Sciences, Education and Scientific Discovery
ICub
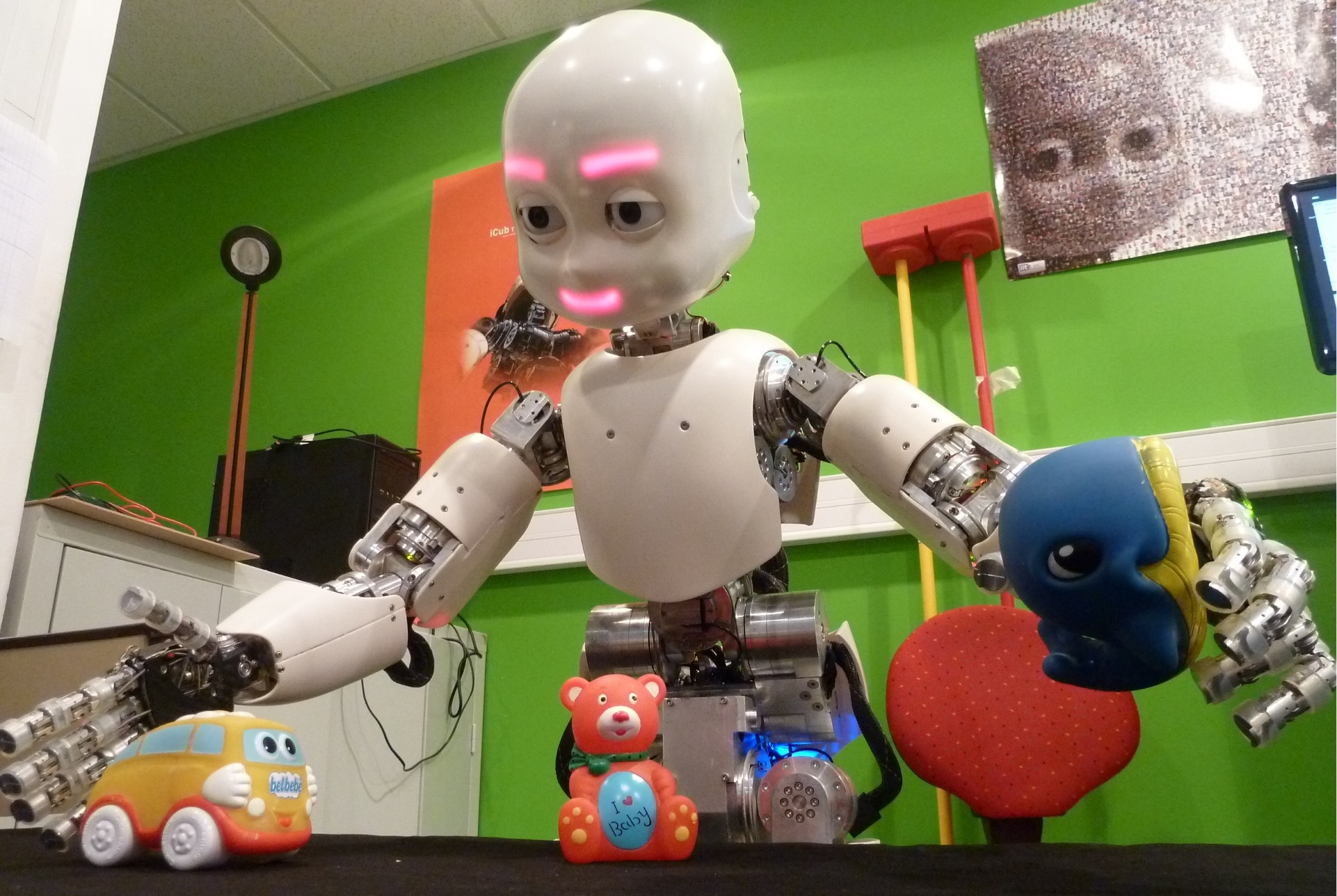
An Icub robot actively learning visual and motor affordances (MACSi project, in coll. with ISIR/Univ. Paris VI)
Inria Center of the University of Bordeaux

Inria Bordeaux Sud-Ouest
200, avenue de la vieille tour
33405, Talence
France
