Flowers Laboratory
FLOWing Epigenetic Robots and Systems
New paper about the Poppy platform accepted for Humanoids2013

A new scientific paper has been accepted for the Humanoids 2013 Conference which will be held in Atlanta. Our work will be presented thursday the 17th October from 11:30 to 12:30 during the interactive session.
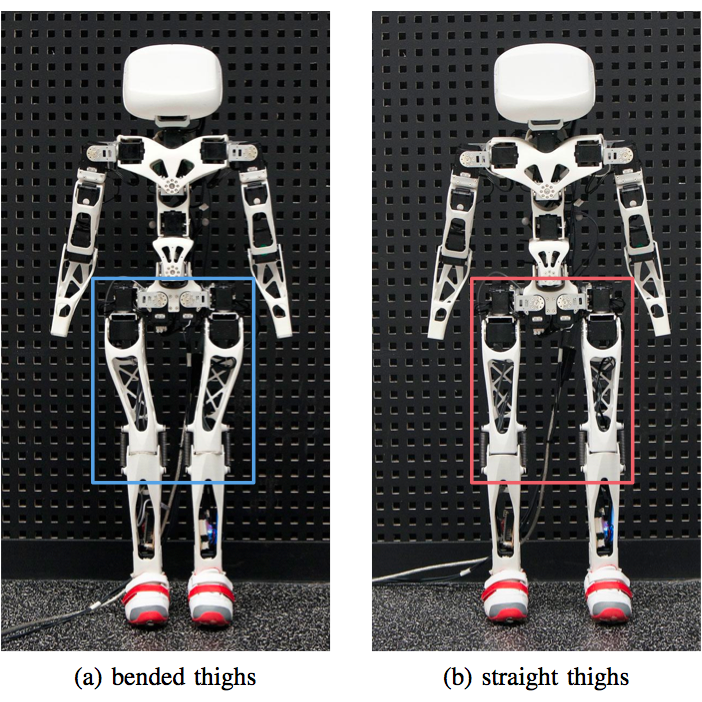
After the description of the design done in the previous paper, we decided to conduct experiments to evaluate the real effect of the thigh shape of Poppy for the biped locomotion. To do so, the current design of the leg is compare with a more classic approach involving straight thigh…
Poppy Humanoid Platform:
Experimental Evaluation of the Role of a Bio-inspired Thigh Shape
We are interested in experimental evaluation of the role of the morphology in the Poppy humanoid platform. More precisely, we have investigated the impact of the bio-inspired thigh, bended of 6°, on the balance and biped locomotion. We compare this design with a more traditional straight thigh.
We describe both the theoretical model and real experiments showing that the bio-inspired thigh allows the reduction of falling speed by almost 60% (single support phase) and the decrease of the lateral motion needed for the mass transfer from one foot to the other by 30% (double support phase).
We also present an experiment where the robot walks on a treadmill thanks to the social and physical guidance of expert users and we show that the bended thigh reduces the upper body motion by about 45% indicating a more stable walk.
For more information about the experiments and results, please feel free to look at the associated paper:

Address in Bordeaux

Inria Bordeaux Sud-Ouest
200, avenue de la vieille tour
33405, Talence
France
Address in Paris

U2IS
ENSTA ParisTech
828, bd des Maréchaux
91762 PALAISEAU CEDEX
France
Institutions
