Flowers Laboratory
FLOWing Epigenetic Robots and Systems
Exploring the role of morphology

In the Flowers Lab, our current research with Poppy studies the role of body morphology in cognitive development, and in particular in the generation of adaptive movement, as well as physical and social interaction with the environment.
We also study how the DIY and open-source approaches, with tools such as 3D printing, can allow to conduct experimentations where the body becomes an experimental variable that can be changed, tuned, repaired in the lab. This has not only important potential consequences for technology, but also for fundamental science and philosophy related to the understanding of humans.
We are also interested in applying new developmental learning algorithms to learn biped walking and we are exploring physical human robot interaction for both human-robot collaboration and socially guided biped walking acquisition.
Exploring morphological properties for biped locomotion
Since the very first drawings of Poppy, we have focused on which morphological properties are fundamental to achieve a human-like and efficient biped walking gait. Our approach is to study biological entities to extract design ideas, then build and experiment them. This is useful both as a modeling tool to understand better human motion, but also as a way to explore novel methods to build robots capable to adapt to the real physical and social world.
Bio-inspiration
Human locomotion represents one of the finest example of mastering bipedal walking. We choose to take functional inspiration of specific elements which seem relevant to improve the locomotion of humanoid robots.
The human being bio-inspiration is expressed on the whole structure of Poppy. On the anatomical point of view, it reproduces the human proportions and their sensorimotor space organization: i.e. the main degrees of freedom (actuated and passive), an inertial unit in the head and force sensors distributed underfoot.
Even if it leads to a major challenge for the balance control, the proportion is also kept for the feet size. Poppy has small feet compared to classic humanoid robots. They take some functional inspirations from the actual human foot such as compliance and toes which seem to be key features for biped locomotion.
Poppy uses the bio-inspired trunk system introduced by Acroban. Using five servo-motors, it allows the reproduction of the main DOFs of the human spine. This feature permits the integration of more natural and fluid motion while improving the user experience during physical interaction. In addition, the spine plays a fundamental role in bipedal walking and postural balance by actively participating in the balancing of the robot.
Exploration of the thigh morphology
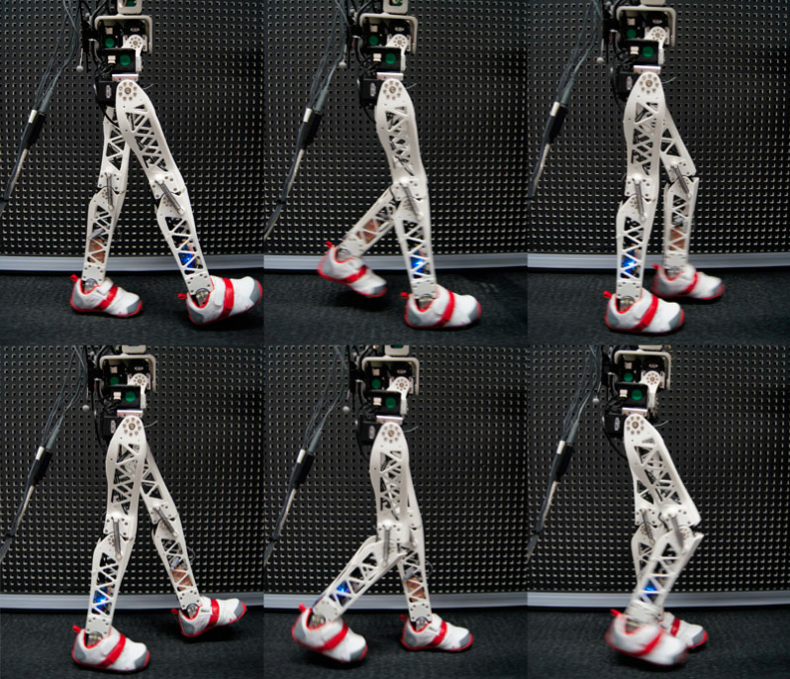
If we look closely at the human morphology of the femur, it appears that it is inclined by 6 degrees. This makes the feet closer to the projection of the center of gravity. We reproduced this on Poppy and have investigated the impact of this thigh design on the balance and biped locomotion using a comparison with a more traditional straight thigh. Thanks to the robot conception, we can easily experiment several morphologies just by modifying the CAO file (here we changed the bended angle to 0°) and printing the new mechanical part.
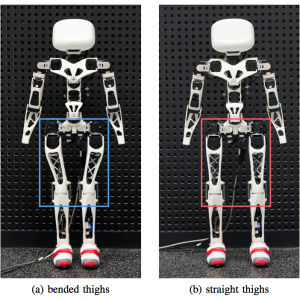
The experimental comparison of the two thighs design showed very interesting results. The bio-inspired thigh design improves Poppy dynamic on three main points useful for biped walking:
- It reduces the falling velocity by almost 60% when the robot is on one foot (single support phase).
- It reduces by 30% the lateral motion needed to transfer the mass of the robot from one foot to the other (double support phase).
- It reduces the motion amplitude on the upper body of 45% and increase the head stability of 30%.
It is really interesting to note that such a small modification of the robot morphology has a very significant impact on the robot behavior!
For more details on this experimentation, please refer to our Humanoids 2013 paper.
Address in Bordeaux

Inria Bordeaux Sud-Ouest
200, avenue de la vieille tour
33405, Talence
France
Address in Paris

U2IS
ENSTA ParisTech
828, bd des Maréchaux
91762 PALAISEAU CEDEX
France
Institutions
