Flowers AI & CogSci Lab
Artificial intelligence, Cognitive Sciences, Education and Scientific Discovery
Blog
New PlosOne paper: Exploiting task constraints for self-calibrated brain-machine interface control using error-related potentials.
Our work on calibration-free interaction applied to Brain-Computer Interaction has been published in PlosOne.
Title: Exploiting task constraints for self-calibrated brain-machine interface control using error-related potentials.
Authors: I. Iturrate, J. Grizou, J. Omedes, P-Y. Oudeyer, M. Lopes and L. Montesano
Abstract: This paper presents a new approach for self-calibration BCI for reaching tasks using error-related potentials. The proposed method exploits task constraints to simultaneously calibrate the decoder and control the device, by using a robust likelihood function and an ad-hoc planner to cope with the large uncertainty resulting from the unknown task and decoder. The method has been evaluated in closed-loop online experiments with 8 users using a previously proposed BCI protocol for reaching tasks over a grid. The results show that it is possible to have a usable BCI control from the beginning of the experiment without any prior calibration. Furthermore, comparisons with simulations and previous results obtained using standard calibration hint that both the quality of recorded signals and the performance of the system were comparable to those obtained with a standard calibration approach.
The code for replicating our experiments can be find on github: https://github.com/flowersteam/self_calibration_BCI_plosOne_2015
The pdf of the paper is available at: https://github.com/flowersteam/self_calibration_BCI_plosOne_2015/releases/download/plosOne/iturrate2015exploiting.pdf
Calibration-Free Human-Machine Interfaces – Thesis Defense
Jonathan Grizou defended his thesis entitled Learning From Unlabeled Interaction Frames on October 24, 2014.
The video, slides, and thesis manuscript can be found at this link: http://jgrizou.com/projects/thesis_defense/
Keywords: Learning from Interaction, Human-Robot Interaction, Brain-Computer Interfaces, Intuitive and Flexible Interaction, Robotics, Symbol Acquisition, Active Learning, Calibration.
Abstract: This thesis investigates how a machine can be taught a new task from unlabeled human instructions, which is without knowing beforehand how to associate the human communicative signals with their meanings. The theoretical and empirical work presented in this thesis provides means to create calibration free interactive systems, which allow humans to interact with machines, from scratch, using their own preferred teaching signals. It therefore removes the need for an expert to tune the system for each specific user, which constitutes an important step towards flexible personalized teaching interfaces, a key for the future of personal robotics.
Our approach assumes the robot has access to a limited set of task hypotheses, which include the task the user wants to solve. Our method consists of generating interpretation hypotheses of the teaching signals with respect to each hypothetic task. By building a set of hypothetic interpretation, i.e. a set of signal-label pairs for each task, the task the user wants to solve is the one that explains better the history of interaction.
We consider different scenarios, including a pick and place robotics experiment with speech as the modality of interaction, and a navigation task in a brain computer interaction scenario. In these scenarios, a teacher instructs a robot to perform a new task using initially unclassified signals, whose associated meaning can be a feedback (correct/incorrect) or a guidance (go left, right, up, \ldots). Our results show that a) it is possible to learn the meaning of unlabeled and noisy teaching signals, as well as a new task at the same time, and b) it is possible to reuse the acquired knowledge about the teaching signals for learning new tasks faster. We further introduce a planning strategy that exploits uncertainty from the task and the signals’ meanings to allow more efficient learning sessions. We present a study where several real human subjects control successfully a virtual device using their brain and without relying on a calibration phase. Our system identifies, from scratch, the target intended by the user as well as the decoder of brain signals.
Based on this work, but from another perspective, we introduce a new experimental setup to study how humans behave in asymmetric collaborative tasks. In this setup, two humans have to collaborate to solve a task but the channels of communication they can use are constrained and force them to invent and agree on a shared interaction protocol in order to solve the task. These constraints allow analyzing how a communication protocol is progressively established through the interplay and history of individual actions.
The emergence of multimodal concepts – defense video
The video of the PhD defense of Olivier Mangin is finally out !
The full dissertation can be found here (olivier.mangin.com/publi).
Olivier’s work focused on learning recurring patterns in multimodal perception. For that purpose he developed cognitive systems that model the mechanisms providing such capabilities to infants; a methodology that fits into the team’s field of developmental robotics.
More precisely, his thesis revolves around two main topics that are, on the one hand the ability of infants or robots to imitate and understand human behaviors, and on the other the acquisition of language. At the crossing of these topics, it studies the question of the how a developmental cognitive agent can discover a dictionary of primitive patterns from its multimodal perceptual flow. It specifies this problem and formulate its links with Quine’s indetermination of translation and blind source separation, as studied in acoustics.
The thesis sequentially studies four sub-problems and provide an experimental formulation of each of them. It then describes and tests computational models of agents solving these problems. They are particularly based on bag-of-words techniques, matrix factorization algorithms, and inverse reinforcement learning approaches.
It first goes in depth into the three separate problems of learning primitive sounds, such as phonemes or words, learning primitive dance motions, and learning primitive objective that compose complex tasks. Finally it studies the problem of learning multimodal primitive patterns, which corresponds to solve simultaneously several of the aforementioned problems. It also details how the last problems models acoustic words grounding.
UAI-14 Interactive Learning from Unlabeled Instructions
We have a new paper accepted to the 2014 Conference on Uncertainty in Artificial Intelligence (UAI) to be held in July 2014 in Quebec, Canada. It is a joint work with Iñaki Iturrate (EPFL) and Luis Montesano (Univ. Zaragoza).
Abstract: Interactive learning deals with the problem of learning and solving tasks using human instructions. It is common in human-robot interaction, tutoring systems, and in human-computer interfaces such as brain-computer ones. In most cases, learning these tasks is possible because the signals are predefined or an ad-hoc calibration procedure allows to map signals to specific meanings. In this paper, we address the problem of simultaneously solving a task under human feedback and learning the associated meanings of the feedback signals. This has important practical application since the user can start controlling a device from scratch, without the need of an expert to define the meaning of signals or carrying out a calibration phase. The paper proposes an algorithm that simultaneously assign meanings to signals while solving a sequential task under the assumption that both, human and machine, share the same a priori on the possible instruction meanings and the possible tasks. Furthermore, we show using synthetic and real EEG data from a brain-computer interface that taking into account the uncertainty of the task and the signal is necessary for the machine to actively plan how to solve the task efficiently.
AAAI-14 Calibration-Free BCI Base Control
We have a new paper accepted to the 2014 AAAI Conference on Artificial Intelligence to be held in July 2014 in Quebec, Canada. We present a method allowing a user to instruct a new task to an agent by mentally assessing the agent’s actions and without any calibration procedure. It is a joint work with Iñaki Iturrate (EPFL) and Luis Montesano (Univ. Zaragoza).
Tour of the Web of February
Each month, I collect interesting stories related to the scientific interest of the team, in science, robotics, and education. Here are the highlights of February.
Hard Science
Scientists have observed a curious trend that seems to affect their research. They first publish a result about a brand new observed effect, that they conclusively prove. Then other studies of the phenomenon come from other scientists, largely corroborating the new idea. But then, the effect observed looses in strength as the years and studies pile on. The authors of the original research themselves find themselves unable to replicate their original findings, despite the apparent absence of errors in methodology in the original article. Jonathan Schooler, victim of the phenomenon, termed the effect “cosmic habituation”, as if nature was habituating to scientist ideas over time. This draw a somber and sobering picture of the effect the scientist has on its data.
New Yorker article:
http://www.newyorker.com/reporting/2010/12/13/101213fa_fact_lehrer?currentPage=all
The problem of bad published results is beginning to dawn enough on scientists that some of them are organising. John Ioannidis in particular, author of the 2005 article “Why most published research findings are false”, worked to develop meta-research, or research about research, and is launching the Meta-Research Innovation Centre at Stanford next month.
The Economist article:
http://www.economist.com/news/science-and-technology/21598944-sloppy-researchers-beware-new-institute-has-you-its-sights-metaphysicians
Journal article “Why most published research findings are false”:
http://www.plosmedicine.org/article/info%3Adoi%2F10.1371%2Fjournal.pmed.0020124
No Science Left Behind
The New York Times and Nature are running a piece on how American science is increasingly financed by wealthy individuals, in a background of budget cuts. The money is usually aimed at trendy subjects, which could skew scientific research to the detriment of less sexy fields and basic research, which prompted Nature to publish a warning in that sense.
New York Time article:
http://www.nytimes.com/2014/03/16/science/billionaires-with-big-ideas-are-privatizing-american-science.html
Nature article:
http://www.nature.com/neuro/journal/v11/n10/full/nn1008-1117.html
Concurrently, the Brain initiative got a big boost in public financing from (announced by) Obama, from $100 millions to $200 millions. The project scientific committee also published a report with a more detailed list of the goals of the initiative.
White House press release:
http://www.whitehouse.gov/sites/default/files/microsites/ostp/FY%202015%20BRAIN.pdf
Executive summary (6 pages):
http://acd.od.nih.gov/presentations/BRAIN-Interim-Report-Executive-Summary.pdf
Education
Math “is fundamentally about patterns and structures, rather than “little manipulations of numbers,”” says math educator Maria Droujkov. But with the way the mathematics are taught, she claims, it is hard to get that, and the mechanical drills that are imposed on us from an early age often prevents children from enjoying mathematics for life. Droujkov defends the idea of going from “simple but hard” activities (rote learning of multiplication tables) to “complex but easy” ones (legos or snowflakes cut-outs to learn symmetry). Well worth the read.
The Atlantic article:
http://www.theatlantic.com/education/archive/2014/03/5-year-olds-can-learn-calculus/284124/
The Computing Research Association has published a sneak preview of its 2013 Taulbee Report, to be published in May in CRN, which looks at enrolment figure in CS for the US. The most notable part is the 22% increase in BS enrolment year-over-year.
Press release:
http://cra.org/resources/crn-online-view/2013_taulbee_report_sneak_preview/
The robot is coming from the US, but the – open source – software suite that powers it is French. And it is in a the lycée la Martinière Monplaisir, in Lyon, that it is being deployed. This telepresence robot is aimed at students unable to be physically present for temporary periods. It makes interacting in class possible, with the teacher and other students, through what they call, tongue-in-cheek, the “robodylanguage”. (shared by Nicolas Jahier)
LyonMag article (in french):
http://www.lyonmag.com/article/61805/le-premier-robot-lyceen-a-ete-presente-a-lyon
Video from FranceTVInfo (in french):
http://www.francetvinfo.fr/societe/education/video-un-robot-lyceen-va-en-cours-a-la-place-des-eleves_511097.html
Musician Cyborg
Science meets art, and creates new things. Gil Weinberg of the Georgia Tech Center for Music Technology (which he founded), created (more probably, supervised the creation of) a robotic prothesis that uses electromyography to control a first drumstick. A second drumstick is also present on the prothesis, but is controlled algorithmically. For the moment, the second drumstick is a on an open loop, with the drummer, Jason Barnes, being the close loop by responding to the rhythms of the second sticks. In the perspective, synchronisation routines and machine learning are envisioned to create a more reactive, yet autonomous second stick.
Video:
http://www.youtube.com/watch?v=ntrlHw6f4E4
Press release:
http://www.gtcmt.gatech.edu/news/robotic-prosthesis-turns-drummer-into-a-three-armed-cyborg
Robots are less impressed by a three-drumsticks drummer. After all, coming from Japan with a 22-arms drummer and 78-fingers guitar player, they are showing off their ability to handle arbitrarily many way of independence. Squarepusher, the composer, is pushing the notion that for music to be emotionally powerful, it doesn’t necessarily have to be performed by humans. (shared by Clément Moulin-Frier)
Pitchfork short story (with video):
http://pitchfork.com/news/53991-squarepusher-collaborates-with-robots-on-new-ep/
Innorobo 2014
Robot phare de Flowers, Poppy acceuillait les professionnels, étudiants et passionnés sur le stand de l’INRIA. Lors de l’inauguration, Gérard Collomb, le maire de Lyon, et Bruno Bonnell, président de Syrobo (le syndicat français de la robotique de services) ont d’ailleurs eu l’occasion de faire connaissance avec Poppy et de le voir marcher tenu par la main. Démonstration qui leur évoqua quelques souvenirs du temps où leurs enfants apprenaient eux aussi à marcher !
Flowers présentait également son projet “Semi autonomous third hand” dont l’objectif est d’approfondir les problématiques de recherche essentielles pour le développement des cobots (comprendre “collaborative robots”), ces robots du futur qui partagent des tâches collaboratives avec les humains. Sur le salon, le robot américain Baxter conçu pour travailler à la chaîne et programmé par démonstration plutôt que par programmation, ou l’exosquelette Hercule de la société française RB3D sont deux autres exemples de l’émergence de la cobotique. Cet aspect de la robotique ne demande qu’à se faire une place dans le milieu industriel où le monde des hommes et celui des robots sont encore systématiquement cloisonnés par d’énormes grilles de sécurité.
A la fermeture du salon, l’heure était à la photo de famille pour bon nombre d’humanoïdes présents à Innorobo. De gauche à droite en arrière plan : Reem-C, Romeo, Nao, Aria, Poppy, et en premier plan Buddy, Robonova, Darwin et Hovis Lite.

Information-seeking, curiosity, and attention: computational and neural mechanisms

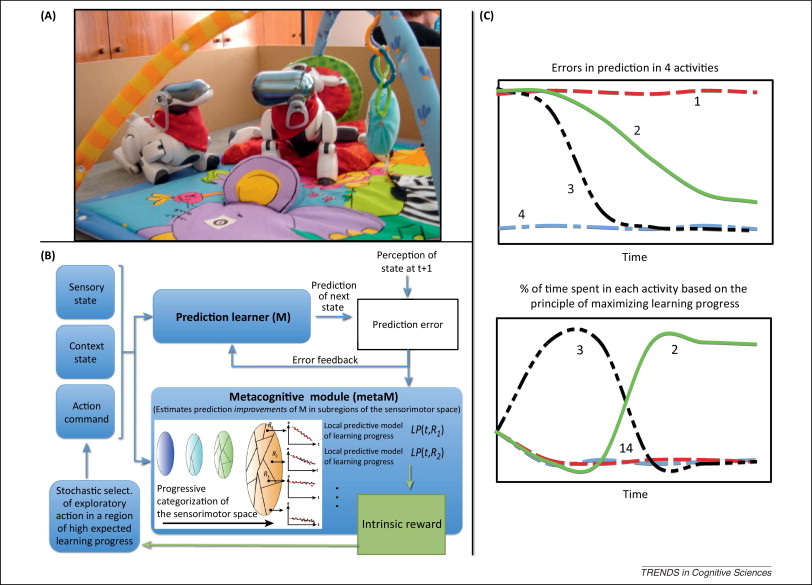
We just published a milestone article on information seeking, curiosity and attention in human brains and robots, in Trends in Cognitive Science. This is the result of our ongoing collaboration with Jacqueline Gottlieb and her Cognitive Neuroscience Lab at Columbia University, NY (in the context of the Inria associated team project “Neurocuriosity”).
Information Seeking, Curiosity and Attention: Computational and Neural Mechanisms
Gottlieb, J., Oudeyer, P-Y., Lopes, M., Baranes, A. (2013)
Trends in Cognitive Science, 17(11), pp. 585-596. http://dx.doi.org/10.1016/j.tics.2013.09.001 Bibtex Pdf preprint
Abstract:
Intelligent animals devote much time and energy to exploring and obtaining information, but the underlying mechanisms are poorly understood. We review recent developments on this topic that have emerged from the traditionally separate fields of machine learning, eye movements in natural behavior, and studies of curiosity in psychology and neuroscience. These studies show that exploration may be guided by a family of mecha- nisms that range from automatic biases toward novelty or surprise to systematic searches for learning progress and information gain in curiosity-driven behavior. In addition, eye movements reflect visual information searching in multiple conditions and are amenable for cellular-level investigations. This suggests that the ocu- lomotor system is an excellent model system for under- standing information-sampling mechanisms.
Highlights
• Information-seeking can be driven by extrinsic or intrinsic rewards.
• Curiosity may result from an intrinsic desire to reduce uncertainty.
• Curiosity-driven learning is evolutionarily useful and can self-organize development.
• Eye movements can provide an excellent model system for information-seeking.
• Computational and neural approaches converge to further our understanding of information-seeking.
New paper about the Poppy platform accepted for Humanoids2013

A new scientific paper has been accepted for the Humanoids 2013 Conference which will be held in Atlanta. Our work will be presented thursday the 17th October from 11:30 to 12:30 during the interactive session.
After the description of the design done in the previous paper, we decided to conduct experiments to evaluate the real effect of the thigh shape of Poppy for the biped locomotion. To do so, the current design of the leg is compare with a more classic approach involving straight thigh… Read more
Inria Center of the University of Bordeaux

Inria Bordeaux Sud-Ouest
200, avenue de la vieille tour
33405, Talence
France
