Flowers AI & CogSci Lab
Artificial intelligence, Cognitive Sciences, Education and Scientific Discovery
Uncategorized
Flowers at Maths Land Competition
Flowers team was invited by CapSciences during the handing-over of the prize of Maths Land competition for students on May 29th in the science museum’s buildings during the Mathematics Week organized by the APMEP (the Association of the Mathematics professors of Public education / l’Association des Professeurs de Mathématiques de l’Enseignement Public).
With the team taking part in the development of the great exhibition CervoRama, it was the opportunity to expose the students to the research the team is conducting, to explain the what a job in academia entails, and to exchange around the various experiments presented.
During the workshop, the goal was to make them discover what innovation is, to stimulate their curiosity by making them meet researchers and to spark their imagination by asking them to find applications with technologies they just learned about. The students were “young reporters” with the mission to realize a report about innovation. For that, they could interview three researchers and engineers working on digital innovations. At the end of the interviews, they presented their vision of innovation in a video.
King-Sun Fu Best Paper Award
At ICRA 2013, Freek Stulp was handed the “King-Sun Fu Best Paper Award of the IEEE Transactions on Robotics for the year 2012” for the paper “Reinforcement Learning with Sequences of Motion Primitives for Robust Manipulation — Freek Stulp, Evangelos Theodorou, and Stefan Schaal”. IEEE T-RO is one of the highest impact journals in robotics, and we are especially honored because this is the first time this award has been given to a paper on machine learning.

Active learning of motor skills with intrinsically motivated goal babbling in robots
We have recently published an extensive article describing the SAGG-RIAC architecture, which allows efficient active learning of motor skills in high-dimensions with intrinsically motivated goal babbling in robots.
Baranes, A., Oudeyer, P-Y. (2013) Active Learning of Inverse Models with Intrinsically Motivated Goal Exploration in Robots, Robotics and Autonomous Systems, 61(1), pp. 49-73. http://dx.doi.org/10.1016/j.robot.2012.05.008.
Tutorial: How to get skeleton from kinect + OpenNI through ROS ?
This tutorial goes very quickly through the concepts and steps required to be able to acquire through ROS framework, a skeleton detected by the Microsoft Kinect device and the OpenNI driver and middleware.
Motivations
Getting a working OpenNI + nite installation sounds like a nightmare to more than a few people who have tried to do it on their own. Getting a working API binding it in your favorite language might also be a difficult quest.
For these reasons a lot of people use bundled versions of OpenNI in other frameworks, which generally means that other people have taken care of fixing the OpenNI + Nite installation process and maintained a working API.
While this might be seen as adding another (useless ?) layer on top of so many abstraction layers, it is on the other hand often saving you a lot of boring work.
Finally, and this is more for roboticists, using ROS as such a framework has many advantages amongst which include:
- access to the device in any language which has ROS bindings,
- immediate and effortless access to the device over network,
- interoperability with other ROS applications, and benefits of the ROS visualization tools,
- etc.
The Ergo-Robots
The Ergo-Robots Experiment
Artificial curiosity and language formation in robots
Exhibition “Mathematics: A Beautiful Elsewhere”
Fondation Cartier pour l’Art Contemporain
Direct links: Exhibition – Team – Publications – Videos – Photos – Press

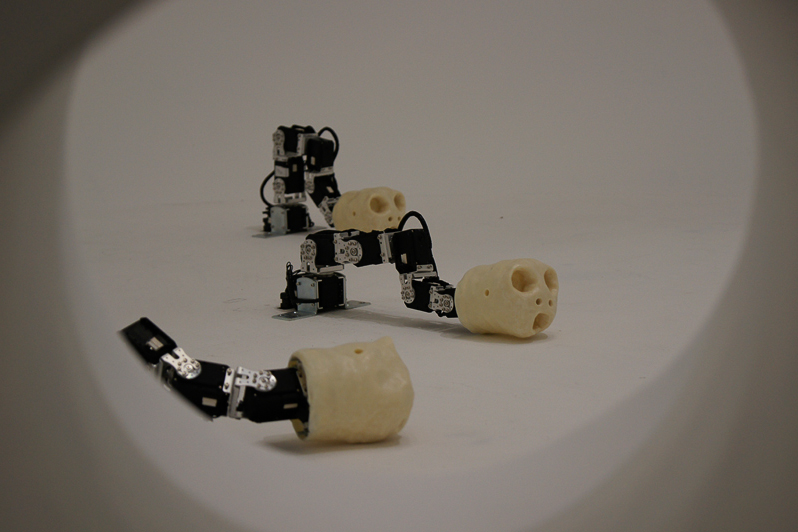
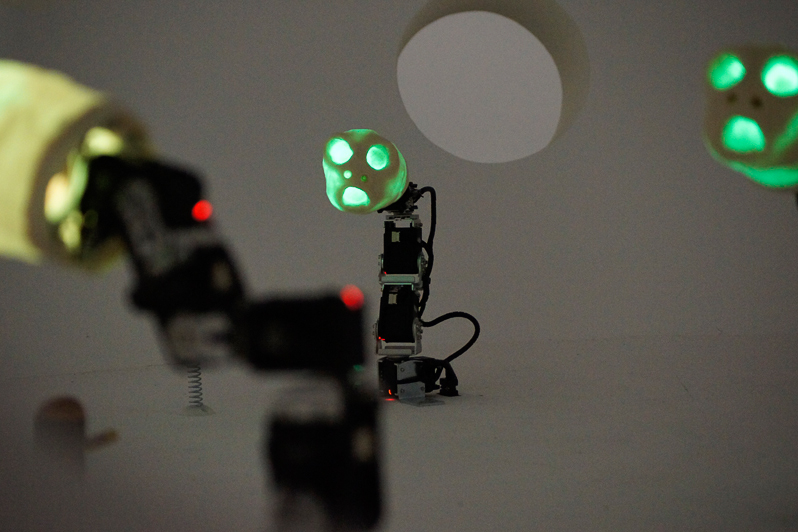
In a big egg that has just opened, a tribe of young robotic creatures evolves and explores its environment, wreathed by a large zero that symbolizes the “origin.” Beyond their innate capabilities, they are outfitted with mechanisms that allow them to learn new skills and invent their own language. Endowed with artificial curiosity, they explore objects around them, as well as the effect their vocalizations produce on humans. Human, also curious to see what these creatures can do, react with their own gestures, creating a loop of interaction which progressively self-organizes into a new communication system established between man and ergo-robots.”Ergo-Robots: Artificial Curiosity and Language” is an installation and experiment presented in the exhibition “Mathematics: A Beautiful Elsewhere“, from 21st october 2011 to 18th march 2012, in Fondation Cartier pour l’Art Contemporain, Paris, France. Read more
New issue of IEEE CIS Newsletter on Autonomous Mental Development
![]()
Robot life emerged at Fondation Cartier
 The Flowers-Fields platform has evolved into a brand new robot species which is now pursuing its development among the exhibition Mathématiques – Un dépaysement soudain (Mathematics – A Beautiful elsewhere) at Fondation Cartier pour l’art contemporain. The platform is named Ergo-Robots for this exhibition, in relation to Micha Gromov’s Ergo-systems, whose collaboration with Pierre-Yves Oudeyer initiated the project. The robots have gained a new egg-shaped living environment and new faces, both designed by David Lynch and his team. We also have been working hard to design a new set of moods and behaviors that also deeply transformed the platform appearance. We strongly encourage those of you spending some time in Paris until March to come to Fondation Cartier, and have a look and the opportunity to interact with Ergo-Robot platform ! More information and pictures can be found on our website dedicated page and some nice video of the installation will soon be available… The Flowers team.
The Flowers-Fields platform has evolved into a brand new robot species which is now pursuing its development among the exhibition Mathématiques – Un dépaysement soudain (Mathematics – A Beautiful elsewhere) at Fondation Cartier pour l’art contemporain. The platform is named Ergo-Robots for this exhibition, in relation to Micha Gromov’s Ergo-systems, whose collaboration with Pierre-Yves Oudeyer initiated the project. The robots have gained a new egg-shaped living environment and new faces, both designed by David Lynch and his team. We also have been working hard to design a new set of moods and behaviors that also deeply transformed the platform appearance. We strongly encourage those of you spending some time in Paris until March to come to Fondation Cartier, and have a look and the opportunity to interact with Ergo-Robot platform ! More information and pictures can be found on our website dedicated page and some nice video of the installation will soon be available… The Flowers team.




ICDL – EpiRob 2011

The first joint edition of the ICDL-EpiRob conferences just ended in Frankfurt. The conference itself was very exciting, and led to many stimulating discussions and exchange for those of us attending.
The Flowers team presented three papers:
- Mai’s talk on Bootstrapping intrinsically motivated learning with human demonstration,
- Manuel and Thomas’ poster on The Interaction of maturational constraints and intrinsic motivations in active motor development,
- and Adrien’s poster on Simultaneous acquisition of task and feedback model.
FLOWERS Team at InnoRobo
 Last week a few members of the FLOWERS team packed their bags and robots and set off to attend the InnoRobo Innovation Robotic Summit which was held in Lyon between the 23rd and 25th March to showcase two of our robots: Acroban and FlowersFields.
Last week a few members of the FLOWERS team packed their bags and robots and set off to attend the InnoRobo Innovation Robotic Summit which was held in Lyon between the 23rd and 25th March to showcase two of our robots: Acroban and FlowersFields.
InnoRobo was established as a chance for international players in the service robotics industry to meet and share new ideas about robotics and their future. There were over 100 robots exhibited of which 30 were shown for the first time in Europe.
3rd French German Workshop HLR 2011
The Acroban project was presented by Olivier LY at the French/German Workshop Humanoid & Legged Robots in Paris, the 14 & 15 february 2011.
The workshop was very interesting, a lot of impressive robots and controls were presented.
Because of their research subjects similar to ours, we particularly enjoyed the presentation of A.Seyfarth from the Lauflabor about how leg compliance shapes the way we moves. And the work of O.von Stryk from the SIM TU Darmstadt about compliant actuation and control of bio-inspired Humanoid Robot Motion.
Inria Center of the University of Bordeaux

Inria Bordeaux Sud-Ouest
200, avenue de la vieille tour
33405, Talence
France
